Chandrayaan-3: 10 key upgrades that improve chances of ISRO’s Moon mission

Even in the ungodly hours of September 7, 2019, the entire nation was glued to their television sets. The Vikram lander, carrying the Pragyan rover in its innards, was expected to soft-land on the Moon and make history for ISRO — and the nation.
Everything unfolded like a perfect script. The landing sequence commenced at 1.38 am on September 7, 2019. Within 10 minutes, the craft came down from the height of 30 km to 7.4 km, the first of the four crucial phases in the autonomous landing sequence.
In the next 38 seconds, the craft came down to 5 km above the Moon, and the next phase, the fine-breaking phase, was kicked in. All was well.
The fine-breaking phase has to bring the craft to a height of 400 metres in the next 96 seconds. But it was apparent to everyone watching the mission control panel that something was amiss. The trajectory was deviating from the safe zone.
The joy, hope, anticipation, and anxiety gave way to gloom in a split second. Just two minutes before the scheduled landing, the fluster was writ large on the faces of the controllers monitoring the descent. The Doordarshan live telecast of Chandrayaan mission was pulled off.
Finally, a crestfallen Dr Sivan, the then chairman of ISRO, announced, “The Vikram lander’s descent was as planned, and normal performance was observed up to an altitude of 2.1 km. Subsequently, communication from lander to the ground stations was lost. Data is being analysed.”
The failure was massive; yet ISRO announced that it would not be beaten but learn from it and bounce back. So, here it is. After four years of inspection, review, and introspection, ISRO has come up with a refurbished mission — Chandrayaan-3.
Also read: Chandrayaan-3 mission to be launched on July 14
Here are some significant upgrades that the ISRO expects will set things right and place the lander and rover — once again named Vikram and Pragyan, respectively — softly and safely on the lunar surface. These boosts have given confidence to the present chairman of ISRO, S Somanath, to declare with confidence that they “will be able to do a soft landing on the Moon” during this mission.
1. No orbiter this time
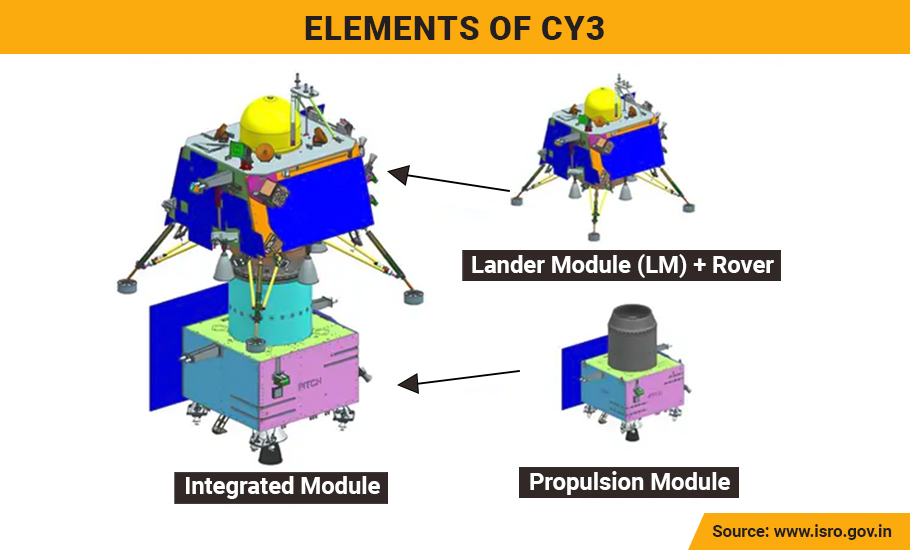
The CY2 mission consisted of an orbiter (that orbited the Moon like an artificial satellite), a lander (that soft landed on the surface of the Moon), and a rover (that moved about the surface of the Moon like a remote toy car). Launched in 2019, the CY2 orbiter is still orbiting the Moon and can assist the CY3 mission. Only the lander of CY2 crashed. Hence, the CY3 craft consists of only the lander and rover.
Like a kangaroo with its baby in the pouch, the lander carries the rover in its innards. The lander-rover combo is placed atop the propulsion module. After launch, using the GSLV rocket, the propulsion unit takes over to steer the craft to the Moon. About 42 days after the launch, the craft will reach the vicinity of the Moon. The propulsion unit will place the CY3 craft in a 100 km x 100 km orbit. The orbit will be modified gradually, ultimately reaching a highly elliptical orbit of 100 km x 30 km. That is when the crucial phase of the touchdown begins.
2. Leg up
According to the mission plan, during the last phase of the landing sequence (E), the craft will be at a height of three metres. It will have a vertical velocity of less than one metre per second (3.6 km) and a horizontal velocity of less than 0.5 metre per second (1.8 mph). From a height of three metres, the craft will fall to the ground with a thud.
The lander’s legs are designed to ensure that the energy at the touchdown is absorbed and dampened to protect the integrity of the craft and instruments aboard. The foot pad at the end of the legs crushes on impact and absorbs the more significant part of the energy. Each of the four legs consists of a telescopic assembly with a crushable damper material. The ISRO has conducted several tests on the lander’s leg mechanism.
“To account for unforeseen deviations, to be on the safer side, ISRO has designed the lander’s leg to withstand even a vertical velocity of 3 metres per second and horizontal velocity of one metre per second,” says Dr Mylswamy Annadurai. “ISRO has tested and demonstrated this capacity in several ground tests,” he adds.
Watch: “Report on Loss of Chandrayaan-2’s Vikram Lander” provides suggestions to fix issues
3. Stability
What appear through a powerful telescope to be a welcoming vast, smooth plain on the Moon is deceptive. Close up, it is full of craters, small and big. Furthermore, the landscape is uneven, dotted with slopes and boulders. Imagine trying to balance a four-legged table on an uneven surface. First, the table will wobble, and if the surface’s slope is too steep, the table may even topple.
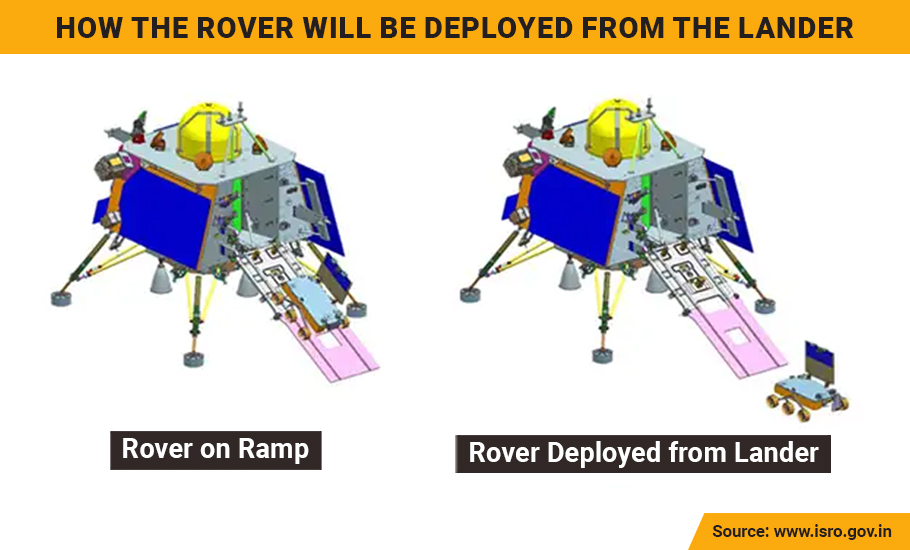
In the case of the Chandrayaan-3, it is not enough if the lander is made stable in an uneven terrain. It carries a rover in its bowel. The ramp must unfold and reach the surface to let the rover roll out. If the slope is greater, the length of the ramp will be inadequate. If the lander wobbles, the rover may topple while rolling out. In slopes of less than or equal to 120, the Vikram lander would be able to stabilise safely using the adjustable telescopic legs mechanism.
4. Better eyes and ears
Most modern aircraft have a front-facing camera that gives a clear runway view during take-off and landing. Likewise, Chandrayaan-2 also had a front-facing camera. Still, the communication system could not transfer the images in real-time. But now the communication system has been beefed up to enable the front-facing camera of the CY3 lander to transmit the images in real-time to the ISRO control centre.
The images are collected not for fun but as part of the autonomous hazard identification and avoidance manoeuvre. “The images from the front-facing camera will be used for autonomous navigation and hazard avoidance manoeuvre, and the images will be sent back to the ground in real-time,” says Annadurai. “Last time, only housekeeping telemetry was downlinked in real-time,” he added.
The craft, once it reaches close enough, must choose a relatively plain place with no hazardous boulders and craters. The craft has to approach the ground with up to one-metre-per-second velocity. The images collected by the front-facing camera will function like the eyes and ears of the craft during the phase from B to D. These images will be processed by the inbuilt AI for navigation and landing. In particular, by comparing the successive images collected by the front-facing camera, the AI would compute the craft’s vertical and horizontal velocity and fine-tune the rocket’s firing to reduce the speed to safe levels.
5. Laser Doppler Velocity (LVD) sensor
We are familiar with police using Doppler Radar speed guns to identify cars speeding over the limit. The instrument can measure the vehicle’s speed by measuring the change in the frequency of the reflected radar waves. A Laser Doppler Velocity (LVD) sensor fires laser pulses towards the ground, and the change in the reflected waves determines the instantaneous velocity of the craft.
“The LDV sensor was developed even for Chandrayaan-2, but since it did not perform well in ground tests then, it was not included in CY2. However, now that we have mastered the technology, it has been included in the CY3,” says Dr Annadurai.
Also read: ISRO conducts key rocket engine test for Chandrayaan-3
6. Only four engines
The lander of the CY2 had four engines surrounding a central fifth to deal with the dust plume during the landing. The surface of the Moon is covered with powdery lunar soil called “regolith”. ISRO added this fifth engine in CY2 to deal with the dust kicked up when the Lander nears the lunar surface. Simulations showed that the dust would cover the entire lander, affecting the sensors without a fifth engine. Hence the fifth engine was introduced to fire at an altitude of 13 metres after the four throttleable engines were shut down, until a second before the touchdown.
One of the significant changes in the Chandrayaan-3 lander is the removal of this central engine. Now, ISRO feels that the blowback is not such a problem that they should risk an additional engine. “The fifth engine was a last-minute addition to CY2. Now with the removal of it, the original CY2 configuration has been retained,” says Dr Annadurai.
7. Guidance algorithm tweaks
It is reported that one of the critical reasons for the failure of the CY2 was a glitch in the software and the guidance algorithm. Just metres from the landing, the glitch made the lander travel faster than the procedure. There was likely a flaw in the computation of the craft’s orientation in a crucial phase of the landing sequence.
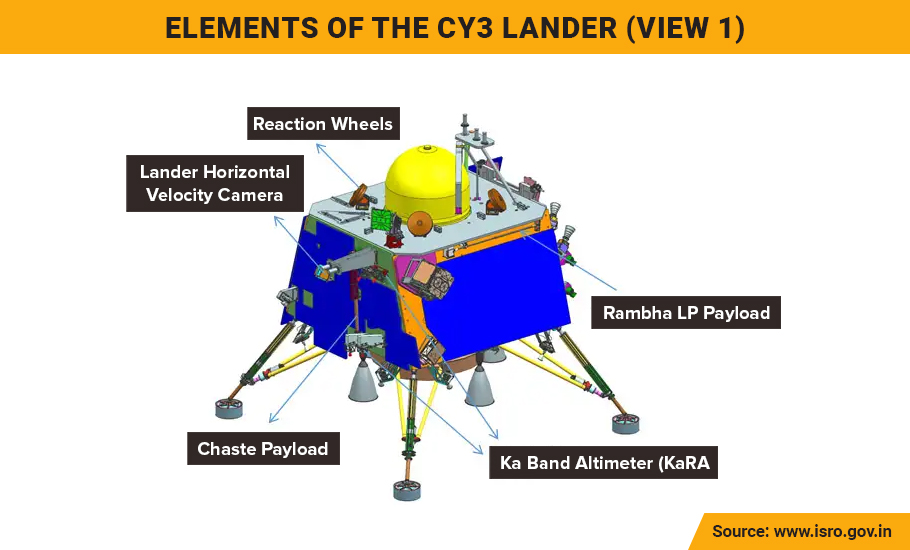
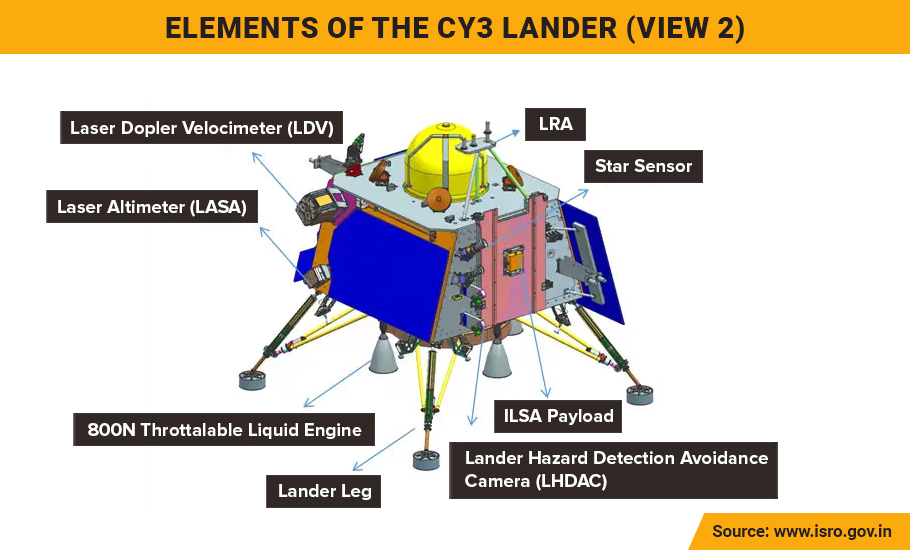
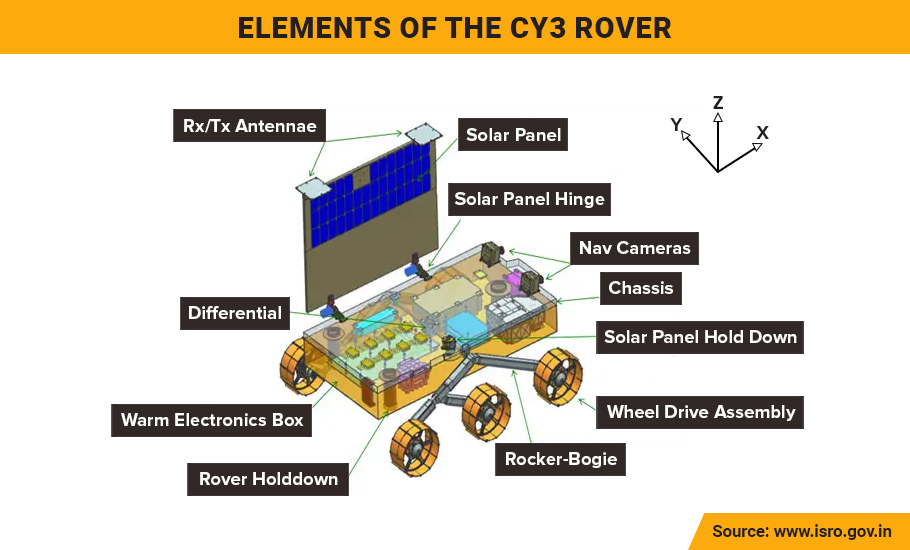
The lander of the CY 3 will use various instruments, such as Laser Inertial Referencing and Accelerometer Package (LIRAP), Ka-Band Altimeter (KaRA), Lander Position Detection Camera (LPDC), Laser Altimeter (LASA), Laser Doppler Velocimeter (LDV), Lander Horizontal Velocity Camera (LHVC), Micro-Star sensor, and LHDAC (Lander Hazard Detection & Avoidance Camera) to gather data on the current position of the craft vis-a-vis the target landing spot, the velocity at which the craft is travelling, the altitude from the surface of the Moon, and so on.
In addition to the front-facing camera, “there are sets of cameras in the lander which are used for observation and vision-based navigation during landing and for post-landing imaging,” explained Sudheer Kumar N, Director of Capacity Building and Public Outreach, ISRO HQ.
In every instance, the autonomous navigation guidance algorithm of the CY3 uses these data to plan the flight path to reach the target landing spot in real-time. Based on this steering plan worked out by the onboard computers, the magnitude of the engines’ throttle is decided. The closed-loop Navigation Guidance and Control (NGC) system refines the trajectory in every instance, navigating the craft to its landing location.
8. Finetuning of the throttling
Earlier, the four 800N engines of the CY2 lander were throttleable between 40% to 100% in an increment of 20%. However, this needed to be improved for the fine-tuning required during the final landing phase. At the rate of a 10% increment, a more gradual throttling has been provided for in the CY3 lander engines. Using these upgrades, the navigation guidance algorithm has been upgraded.
Also read: Chandrayaan-2 discovers rich sodium on moon for first time
9. Improved data rate
Visually impaired persons often use a stick to feel the ground while walking. Likewise, onboard sensors provide terrain orientation to the autonomous AI navigation system in CY3. These sensors typically send a pulse and analyse the reflected pulse to determine various parameters like speed, location, etc.
Just like the visually impaired constantly move the stick from right to left and again from left to right while walking to avoid any hazard on the path, the sensors must sample the parameters often to ensure a smooth landing. “The S-band and X-band telemetry date rate is enhanced in Chandrayaan-3 for a better sampling of critical parameters and faster updates to the ground,” says Sudheer Kumar.
10. No additional solar cells, but beefed up the communication system
The committee that examined the failure of the CY2 had recommended the possibility of fixing solar cells “on the fourth side vertical panel where the rover is accommodated to be studied to avoid power issues if landing happens with large attitude error resulting in the absence of Sun in the plane”. However, the images released by ISRO does not show any solar panel on the side of the lander hosting the ramp and the rover.
Nonetheless, the ISRO has fitted the lander with many more redundant communication antennas that, irrespective of the craft’s orientation after landing, would still communicate with the control centre.
(The author is a scientist with Vigyan Prasar, New Delhi)