'Fifteen minutes of terror' that await Isro on Saturday

After a 42-day journey since its launch on July 22, the lander-rover combo separated from Chandrayaan-2’s orbiter module at 1315 hrs IST on Monday. Vikram, the lander module carrying Pragyaan the rover module in its belly is effectively at the doorsteps of the Moon. On the wee hours of September 7, 2019 the lander-rover combo will attempt soft-land on the Moon. The fete as famously described by Isro chairman Dr Kailasavadivoo Sivan as ‘fifteen minutes of terror’. What are the challenges of landing on the Moon?
Terminal velocity challenge
Landing on the surface of the Moon or any other celestial object involves primarily reducing the speed of the fall. For example, Moon has just one-sixth of Earth’s gravity. Vikram module is in 30 km x 100 km orbit. If it falls from the closest point in the path, that is 30 km, the terminal velocity of the craft as it strikes the surface of the Moon will be 1,122 km per hour. For comparison, the speed of the fastest bullet train is just around 400 km per hour. Even if the Vikram lander were to fall from the deorbited height of 7.4 km, the terminal velocity would be 154.84 m/sec, which is whooping 557 km per hour. No spacecraft will survive the hit. For soft landing the speed has to gentle 2 metres per second, that is 7.2 km per hour.
How do you reduce the speed of a spacecraft hurling at a celestial object? A simple solution is a parachute. The first-ever soft landing on the surface of Venus, by Soviet spacecraft Venera 7 way back on August 17, 1970 and the Mars landing by the Soviet craft Mars2 on December 2, 1971 was done by deploying parachutes. However, resorting to parachutes requires an atmosphere. What is feasible on Venus and Mars with sufficient atmosphere is not an option on Moon, with practically has no atmosphere. That is the tricky part.
Rockets to rev up and slow down
Rockets, we often assume speed things up. However, the very same contraption can also be used to slow and reduce the speed of a spacecraft. Soft landing on Moon involves skillful use of retrorockets to slow the craft to touch down gently.
Come Diwali most of us will fire rockets and as the fire and fume surge downwards, the rocket sores up. Imagine you are fire department personnel holding a hose in your hand. As soon as your colleague opens the tap, and the water gushes and sprouts out, you will feel a force pushing you backwards. In simple words, this is the rocket principle. Hold the hose pointed to left you will be shoved to the right, hold facing down you will be pushed up.
Also watch: Interactive graphic: Chandrayaan 2, India’s ambitious mission to moon
Suppose you are cycling forward and holding a hose pointed backwards. The gushing water will push you forward and you will cycle faster. Instead, suppose you aim the tube to the front, the backward shove of the hose will slow you down. In short, the same rockets that can speed up can also be used to reduce speed. Rockets, when fired against the direction of motion, propel the object, when fired towards the direction of the motion, retard the speed.
Vikram lander has five 800N throttle able engines at its bottom, which use Mono Methyl Hydrazine (MMH) fuel and mixed oxides of Nitrogen (MON-3) as fuel. Once the Vikram lander module separates from the orbiter module, these five engines rev up to propel orbit manoeuvrers. Further, each of the four legs of the lander is fitted with two 50N thrusters. The eight thrusters help attitude control, which controls the tilt and orientation of Vikram craft while flying and landing.
Landing trajectory
The fuel required for retrorockets to counter the gravity of the Moon for about 30 kilometres is enormous. Out of Vikram’s total weight of 1,471 kg, 845 kg is fuel and the remaining dry weight is 626 kg. Adding more fuel means the science objective will be lost. Hence, Vikram will follow a landing trajectory using less fuel.
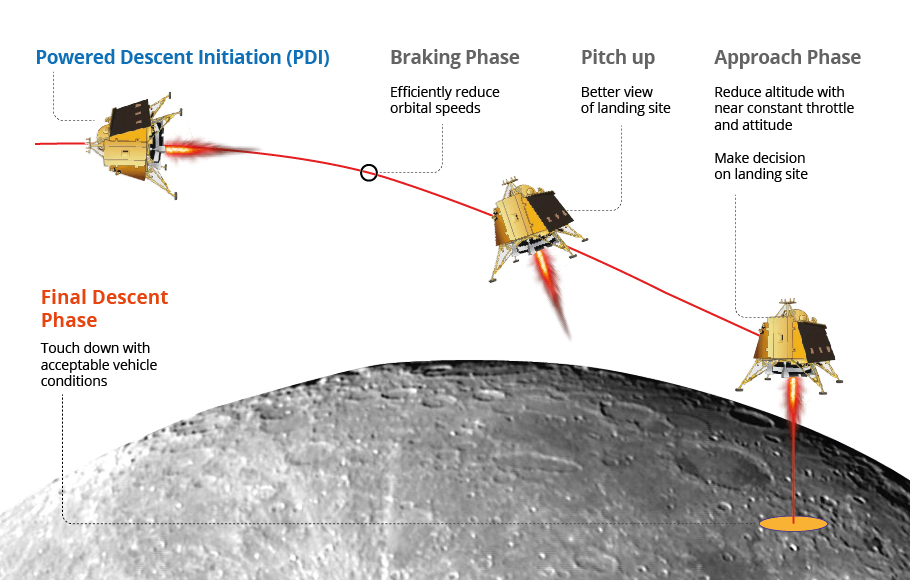
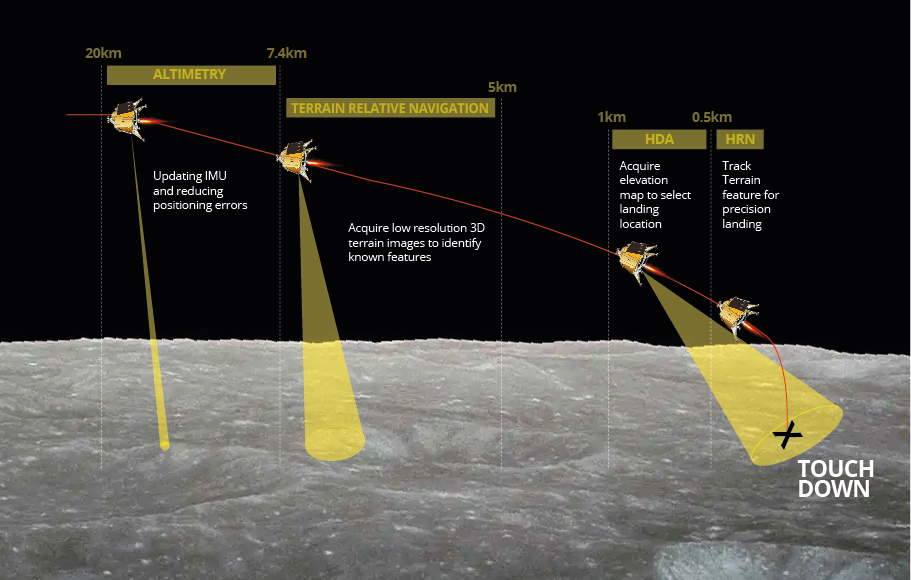
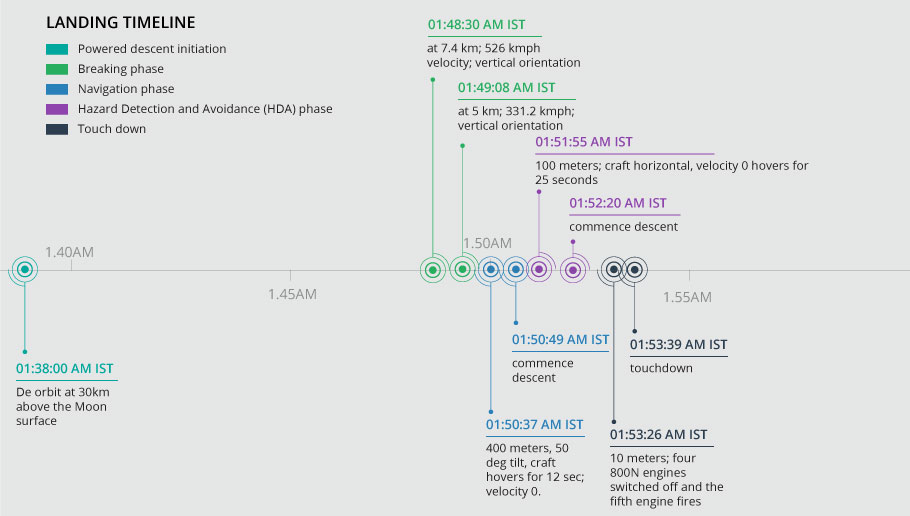
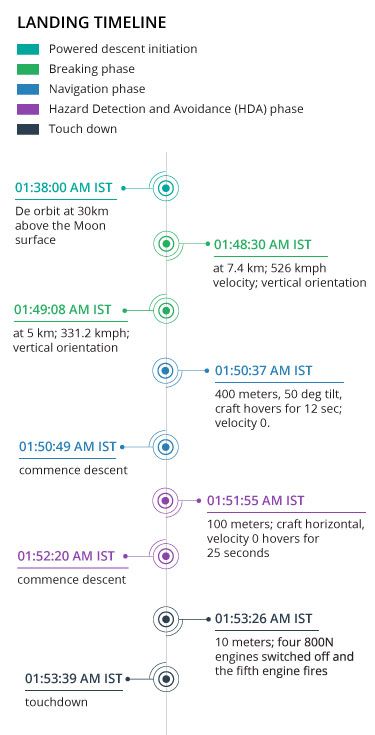
On September 7, 2019, at 1.38 am IST, the powered descent initiation (PDI) will commence. At that instant, the lander will be at its closest point to Moon in its 30×00 km elliptical orbit. The retrofire of the four of the five 800N engines will reduce the altitude of the craft. Within 10 min 30-sec lander would have reached a height of 7.4 km. The orbital velocity at this point will be 526 kmph. At this instant, the craft is about 500 km away from the landing site.
Next comes the breaking phase, where the main aim will be to reduce the speed substantially. In the next 38 seconds, the retro engines will break the speed and reduce it to 331.2 kmph. Now the craft would drop to a height of just 5 kilometres from the surface the Moon. The position of the ship would be only 350 meters short of the landing site.
Navigation
Reducing the speed and lowering the height is essential but is not sufficient. The craft has to navigate to the near about of the selected landing point.
As the retrorockets fire, even a minute difference of on arc minute (1/60th of a degree) in the direction would take the craft one kilometre away from the intended point for every 350 kilometres. Hence to reach the target point, the position of the craft must be estimated and the best path to traverse must be charted. To navigate to the target point, we need to know the precise location, direction and speed of motion as well as its altitude. Vikram lander will use the most advanced Terrain Relative Navigation (TRN) to navigate to its landing point.
Also read: Chandrayaan-2: Vikram Lander successfully separates from Orbiter
The radio altimeter, a pattern detection camera, Laser Inertial Reference and Accelerometer Package (LIRAP) and the velocity sensor instruments will come alive. By sending radio waves to the ground and detecting the returned pulse, the radio altimeter measures the height accurately. Using the motion sensors (accelerometers) and rotation sensors (gyroscopes) the LIRAP computers compute the precise location of the craft as well as its orientation, direction and speed. This is akin to the location blue dot we see in our google maps. The orbiter module is fitted with an Orbiter High-Resolution Camera (OHRC) which has an optical resolution of 30 centimetres. As the orbiter goes around the Moon, the high resolution images are captured and stored into Vikram lander’s memory. The pattern detection camera in Vikram captures the pictures of the Moon and compares it with the stored image and helps precise position estimation.
During the first 11 minutes from the decent initiation, the orientation of the craft was vertical. That is the lander legs, and 800N retrorockets were facing forward. In due course, the lander has to land with its legs facing downwards. Further, the cameras placed in the legs need to see the ground to get a clear image. Hence the 50N thrusters are fired appropriately to tilt the pitch of the craft to 50 degrees. In this orientation, the Lander cameras LI1, LI2, LI3 and LI4 would be able to get a better view of the surface.
Approach and touchdown
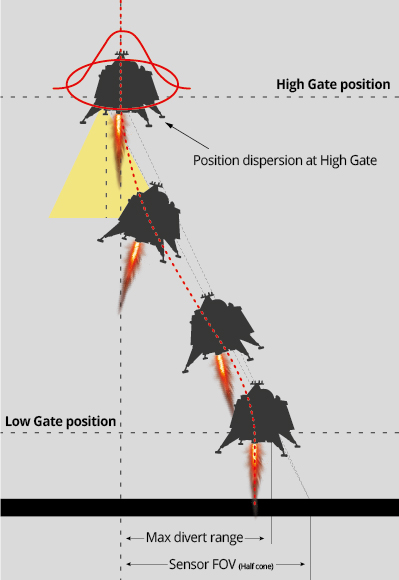
Moon is a grey, cratered landscape. If by chance one of the legs stumble into the hole or stand on a stone, the craft may tumble. The ramp may not touch the ground, and the rover perhaps may not be able to roll out. Hence, it is not only essential that the craft drops down slowly but also chose and touchdown on an even surface.
After 12 minutes 37 sec of deorbit and descent, the lander drops down to a height of 400 meters. At this point, the Hazard Detection and Avoidance (HDA) cameras kick in. The craft is tilted at 50 degrees and hovers at the same position for 12 seconds to assess landing site. Then the ship slowly moves for about 66 seconds approach 100-meter height. At this point, using the close-up images and other data, the craft has to decide if the chosen landing site is good to go. If the selected location unsatisfactory, the spacecraft will pick an alternative site move towards it.
Also read: Chandrayaan-2 sends pictures of Moon from altitude of 4,375 km
Once the site is chosen, by keeping the four 800N rockets firing downwards slowly the craft descends from 100 meters to 10 meters in about 1 minute and 6 seconds. By now the craft is almost very near the landing site. The tilt of the craft is complete, and the legs and the retrorockets are facing down.
The gravitational pull of the Moon is balanced by the firing of retrorocket downwards, and the craft hovers above the landing site for about 25 seconds. HDA cameras make once more the assessment. The instruments try to identify a clear ground for a safe landing.
Avoiding kicking up dust
The last manoeuvre of the touchdown is aimed at not kicking up dust. The surface soil of the Moon, called lunar regolith, is mostly made up of fine dust, finer than talcum powder. If the lander lands with all its retrorockets firing downwards, it would throw up a huge plume of dust. The dust would ultimately settle on the surface of the craft, dirtying the solar panels and reducing its efficiency. The dust may also creep into the electronics and cause havoc. Hence the four 800N engines would be shut down, and the central fifth 800N engine would be fired when the craft reaches an altitude of 10 meters. The free-fall velocity countered by the retrorocket, the craft will take 13 seconds to come down the last ten meter of height. At 15 minutes 39 seconds from the deorbit, the Lander would have a touchdown.
All autonomous
Like a video game, the mission controllers cannot virtually drive, navigate and guide the craft for safe landing. The decisions for navigation hazard avoidance identification of safe zone for landing all involve split second decision making. The machine learning and AI enabled on board computers will autonomously made decisions. Indeed the fifteen minutes will be a nail biting moments for the mission engineers and scientists of Isro.
Post landing
After a successful soft landing, the health check-up will be undertaken. The first image from the Vikram is expected in about 15 minutes of arrival. However, the ramp for the rover will be slide down only after three hours of landing, awaiting the total settle down of the dust. For the next fourteen days, that is one lunar daytime, the Vikram, the lander module and Prgayan; the rover module will operate. The Orbiter is expected to function for about two years.